Оперативно-тактический разведывательный БПЛА «141» (СССР)
 Активные целенаправленные работы по беспилотной технике начались в ОКБ А.Н. Туполева в 1956 г., когда по решению Андрея Николаевича в составе ОКБ-156 было сотворено спец подразделение «К» под управлением А.А. Туполева, задачей которого была разработка достаточно широкой палитры беспилотных ударных самолетов-снарядов средней и межконтинентальной дальности. По всем этим проектам под управлением Алексея Андреевича Туполева в подразделении «К» во 2-ой половине 1950-х гг. вместе с другими предприятиями и организациями отрасли была выполнена большая проектно-исследовательская работа, позволившая в первой половине 1960-х гг. сделать принципно новые беспилотные ЛА.
В 1959 г. начались тесты ударного комплекса среднего радиуса деяния Ту-121. Но уже в 1960 г. заказчик поменял свои требования к первому беспилотному комплексу ОКБ. От «туполевцев» требовалось в кратчайшие сроки на базе Ту-121 сделать далекий беспилотный разведывательный комплекс ДБР-1 (Ту-123 «Ястреб»). В 1960 г. начались тесты частей этого комплекса, который в предстоящем выпускался серийно и был принят на вооружение в мае 1964 г. Беспилотный самолет с наибольшей скоростью до 2700 км/ч и длительной 2200 км/ч на высоте более 20 км предназначался для разведки особо защищенных объектов в глубине местности противника. Эксплуатация комплекса ДБР-1 подтвердила высочайший потенциал БПЛА, правда каждый полет 35-тонного аппарата был эксклюзивной операцией, а сам он был рассчитан на однократное применение и, естественно, использовать его в тактических целях было и нецелесообразно из-за очень больших издержек, и трудно на техническом уровне.
Посреди 1960-х гг. единственным беспилотным фронтовым лазутчиком в наших ВВС оставался Ла-17Р, принятый на вооружение в 1 954 г. и к тому времени морально устаревший. В то же время военно-воздушные силы США имели новый БПЛА Райян «Файрби», который активно применялся во Вьетнаме. Наши зенитчики, помогавшие вьетнамским товарищам отражать южноамериканскую злость, докладывали, что БПЛА является очень сложной целью, и противник его употребляет заместо пилотируемых самолетов в районах, прикрываемых ракетными комплексами ПВО, как старенькыми типа С-75, так и новыми С-125М и «Стрела». Развитию этого направления в СССР на рубеже 1960-х гг. мешали перегибы в нашей военной доктрине в сторону завышения роли ракетно-ядерного орудия. Складывалась феноминальная ситуация: хотя декларировалось, что в не далеком будущем обыденные воздушные суда будут изменены беспилотными, появившаяся в то время «конкуренция» авиационной и ракетной отраслей препятствовала развитию БПЛА. Средств на все и сразу не хватало, а ценность всегда оставался за ракетчиками. Когда 1-ый секретарь ЦК КПСС Н.С. Хрущев, зачинатель этих вредных тенденций, был выслан на пенсию, подход к строительству наших вооруженных сил стал более равновесным, и создание новых боевых самолетов, в том числе беспилотных, возобновилось. В это время ОКБ Туполева получило задание на разработку войсковых комплексов разведки - поначалу ВР-2, потом ВР-3. Первым в работу пошел ВР-3 с беспилотным самолетом «Рейс» («143») - он был наименьшей размерности.
Комплекс «Рейс» был должен обеспечивать тактической разведывательной информацией командиров мотопехотных и танковых дивизий, а ВР-2 «Стриж» - штабы армий и фронтов, имея оборудование с увеличенной площадью съемки. Важным их различием от ДБР-1 стала возможность неоднократного внедрения дорогостоящего беспилотного самолета. Заказчик желал приблизить ресурс БПЛА к характеристикам, соответствующим для обыденных самолетов, но согласился с резонами создателя и на первом шаге эксплуатации ограничил число полетов пятью. Использовать беспилотный аппарат предполагалось намедни и в процессе больших войсковых наступательных либо оборонительных операций.
Активные целенаправленные работы по беспилотной технике начались в ОКБ А.Н. Туполева в 1956 г., когда по решению Андрея Николаевича в составе ОКБ-156 было сотворено спец подразделение «К» под управлением А.А. Туполева, задачей которого была разработка достаточно широкой палитры беспилотных ударных самолетов-снарядов средней и межконтинентальной дальности. По всем этим проектам под управлением Алексея Андреевича Туполева в подразделении «К» во 2-ой половине 1950-х гг. вместе с другими предприятиями и организациями отрасли была выполнена большая проектно-исследовательская работа, позволившая в первой половине 1960-х гг. сделать принципно новые беспилотные ЛА.
В 1959 г. начались тесты ударного комплекса среднего радиуса деяния Ту-121. Но уже в 1960 г. заказчик поменял свои требования к первому беспилотному комплексу ОКБ. От «туполевцев» требовалось в кратчайшие сроки на базе Ту-121 сделать далекий беспилотный разведывательный комплекс ДБР-1 (Ту-123 «Ястреб»). В 1960 г. начались тесты частей этого комплекса, который в предстоящем выпускался серийно и был принят на вооружение в мае 1964 г. Беспилотный самолет с наибольшей скоростью до 2700 км/ч и длительной 2200 км/ч на высоте более 20 км предназначался для разведки особо защищенных объектов в глубине местности противника. Эксплуатация комплекса ДБР-1 подтвердила высочайший потенциал БПЛА, правда каждый полет 35-тонного аппарата был эксклюзивной операцией, а сам он был рассчитан на однократное применение и, естественно, использовать его в тактических целях было и нецелесообразно из-за очень больших издержек, и трудно на техническом уровне.
Посреди 1960-х гг. единственным беспилотным фронтовым лазутчиком в наших ВВС оставался Ла-17Р, принятый на вооружение в 1 954 г. и к тому времени морально устаревший. В то же время военно-воздушные силы США имели новый БПЛА Райян «Файрби», который активно применялся во Вьетнаме. Наши зенитчики, помогавшие вьетнамским товарищам отражать южноамериканскую злость, докладывали, что БПЛА является очень сложной целью, и противник его употребляет заместо пилотируемых самолетов в районах, прикрываемых ракетными комплексами ПВО, как старенькыми типа С-75, так и новыми С-125М и «Стрела». Развитию этого направления в СССР на рубеже 1960-х гг. мешали перегибы в нашей военной доктрине в сторону завышения роли ракетно-ядерного орудия. Складывалась феноминальная ситуация: хотя декларировалось, что в не далеком будущем обыденные воздушные суда будут изменены беспилотными, появившаяся в то время «конкуренция» авиационной и ракетной отраслей препятствовала развитию БПЛА. Средств на все и сразу не хватало, а ценность всегда оставался за ракетчиками. Когда 1-ый секретарь ЦК КПСС Н.С. Хрущев, зачинатель этих вредных тенденций, был выслан на пенсию, подход к строительству наших вооруженных сил стал более равновесным, и создание новых боевых самолетов, в том числе беспилотных, возобновилось. В это время ОКБ Туполева получило задание на разработку войсковых комплексов разведки - поначалу ВР-2, потом ВР-3. Первым в работу пошел ВР-3 с беспилотным самолетом «Рейс» («143») - он был наименьшей размерности.
Комплекс «Рейс» был должен обеспечивать тактической разведывательной информацией командиров мотопехотных и танковых дивизий, а ВР-2 «Стриж» - штабы армий и фронтов, имея оборудование с увеличенной площадью съемки. Важным их различием от ДБР-1 стала возможность неоднократного внедрения дорогостоящего беспилотного самолета. Заказчик желал приблизить ресурс БПЛА к характеристикам, соответствующим для обыденных самолетов, но согласился с резонами создателя и на первом шаге эксплуатации ограничил число полетов пятью. Использовать беспилотный аппарат предполагалось намедни и в процессе больших войсковых наступательных либо оборонительных операций.
 Проектирование комплекса «Стриж» пришлось на время, когда завершалось перевооружение фронтовой разведывательной авиации на сверхзвуковые Як-28Р и МиГ-21Р, также шли тесты высотного лазутчика МиГ-25Р, способного летать со скоростью 3000 км/ч. Командование ВВС связывало перспективы конкретно с этими самолетами, и многие считали, что ожидания в отношении БПЛА завышены, а в реальной обстановке только пилотируемые лазутчики сумеют выполнить все поставленные задачки. В какой то мере это была «реакция» на отношение к пилотируемой авиации, которое укоренилось во времена Хрущева. Но перевооружение НАТО новыми ракетными и ствольными комплексами войсковой ПВО, возникновение переносных ЗРК, также усиление истребительной авиации возможного противника принудило все таки приступить к разработке «беспилотника». Аппарату была поставлена задачка делать разведку в нескольких режимах на глубину до 500 км, в том числе в сложных метеоусловиях и ночкой. Выполняя прорыв рубежа ПВО, он был должен разгоняться до 1300 км/ч, а на участках, где противодействия не ожидалось, скорость понижалась до 9501100 км/ч. Полет был должен проходить по переменному профилю на малых и средних высотах.
Всепогодности и универсальности внедрения планировалось достигнуть за счет использования новых средств разведки в сменных комплектах мотивированной нагрузки. Было их предвидено 5, и каждый решал свою специфическую задачку. Чтоб войсковые командиры могли отлично использовать полученную информацию, нанося удары по найденным целям либо строя маневр собственных сил, нужно было значительно повысить качество разведывательной аппаратуры. Для надежной идентификации отснятых объектов разрешение аэрофотоаппарата должно было быть менее 15 см, а инфракрасной станции - 30-40 см. Но тогдашний уровень техники (к слову, и на Западе он был в то время не выше) принудил немного ослабить требования к средствам разведки. У конструкторов самого беспилотного самолета тоже были свои проблемы - «покупные изделия» очень отличались друг от друга габаритами, питанием и специфичностью установки, поэтому запаковать их в сменные модули не удалось и пришлось под каждый набор делать свою модификацию БПЛА. Так было дешевле и комфортнее и производству, и эксплуатанту.
В конечном итоге родился разумный компромисс меж хотимым и вероятным. Набор I («день», вариант 07) включал два фотоаппарата: многообещающий А-86П, который с высоты 100-1000 м снимал полосу шириной, равной 6 и длиной 100 шестидесяти высотам полета (6Нх160Н, стандартная высота внедрения самолета «141» в данном случае была 300 м). На снимке, изготовленном с таковой высоты, можно было верно выделить объект либо его деталь размером более 30 см (этот параметр и именуется разрешающей способностью). Панорамный ПА-4/90 фотографировал полосу 10Нх450Н с разрешением до 40 см.
Набор II («ночь», вариант 08) состоял из сделанного во Всесоюзном энергетическом институте им. Ленина тепловизора второго поколения «Зима» (главный конструктор станции И.А. Лобанев) и сопряженной с ним аппаратуры. Он снимал полосу 3,4Нх230Н, другими словами с эшелона 1000 м в кадр попадала территория 3,4х230 км. Инфракрасная съемка реально производилась с разрешением 70 см, выделяя объекты, разность температур которых с окружающим фоном составляла всего 0,3°С. Это позволяло даже найти, как издавна был заглушен движок танка, спрятанного в лесу под маскировочной сетью. Другие комплекты предугадывали аппаратуру радиохимического наблюдения, также станции лазерной и радиотехнической разведки.
Проектирование комплекса «Стриж» пришлось на время, когда завершалось перевооружение фронтовой разведывательной авиации на сверхзвуковые Як-28Р и МиГ-21Р, также шли тесты высотного лазутчика МиГ-25Р, способного летать со скоростью 3000 км/ч. Командование ВВС связывало перспективы конкретно с этими самолетами, и многие считали, что ожидания в отношении БПЛА завышены, а в реальной обстановке только пилотируемые лазутчики сумеют выполнить все поставленные задачки. В какой то мере это была «реакция» на отношение к пилотируемой авиации, которое укоренилось во времена Хрущева. Но перевооружение НАТО новыми ракетными и ствольными комплексами войсковой ПВО, возникновение переносных ЗРК, также усиление истребительной авиации возможного противника принудило все таки приступить к разработке «беспилотника». Аппарату была поставлена задачка делать разведку в нескольких режимах на глубину до 500 км, в том числе в сложных метеоусловиях и ночкой. Выполняя прорыв рубежа ПВО, он был должен разгоняться до 1300 км/ч, а на участках, где противодействия не ожидалось, скорость понижалась до 9501100 км/ч. Полет был должен проходить по переменному профилю на малых и средних высотах.
Всепогодности и универсальности внедрения планировалось достигнуть за счет использования новых средств разведки в сменных комплектах мотивированной нагрузки. Было их предвидено 5, и каждый решал свою специфическую задачку. Чтоб войсковые командиры могли отлично использовать полученную информацию, нанося удары по найденным целям либо строя маневр собственных сил, нужно было значительно повысить качество разведывательной аппаратуры. Для надежной идентификации отснятых объектов разрешение аэрофотоаппарата должно было быть менее 15 см, а инфракрасной станции - 30-40 см. Но тогдашний уровень техники (к слову, и на Западе он был в то время не выше) принудил немного ослабить требования к средствам разведки. У конструкторов самого беспилотного самолета тоже были свои проблемы - «покупные изделия» очень отличались друг от друга габаритами, питанием и специфичностью установки, поэтому запаковать их в сменные модули не удалось и пришлось под каждый набор делать свою модификацию БПЛА. Так было дешевле и комфортнее и производству, и эксплуатанту.
В конечном итоге родился разумный компромисс меж хотимым и вероятным. Набор I («день», вариант 07) включал два фотоаппарата: многообещающий А-86П, который с высоты 100-1000 м снимал полосу шириной, равной 6 и длиной 100 шестидесяти высотам полета (6Нх160Н, стандартная высота внедрения самолета «141» в данном случае была 300 м). На снимке, изготовленном с таковой высоты, можно было верно выделить объект либо его деталь размером более 30 см (этот параметр и именуется разрешающей способностью). Панорамный ПА-4/90 фотографировал полосу 10Нх450Н с разрешением до 40 см.
Набор II («ночь», вариант 08) состоял из сделанного во Всесоюзном энергетическом институте им. Ленина тепловизора второго поколения «Зима» (главный конструктор станции И.А. Лобанев) и сопряженной с ним аппаратуры. Он снимал полосу 3,4Нх230Н, другими словами с эшелона 1000 м в кадр попадала территория 3,4х230 км. Инфракрасная съемка реально производилась с разрешением 70 см, выделяя объекты, разность температур которых с окружающим фоном составляла всего 0,3°С. Это позволяло даже найти, как издавна был заглушен движок танка, спрятанного в лесу под маскировочной сетью. Другие комплекты предугадывали аппаратуру радиохимического наблюдения, также станции лазерной и радиотехнической разведки.
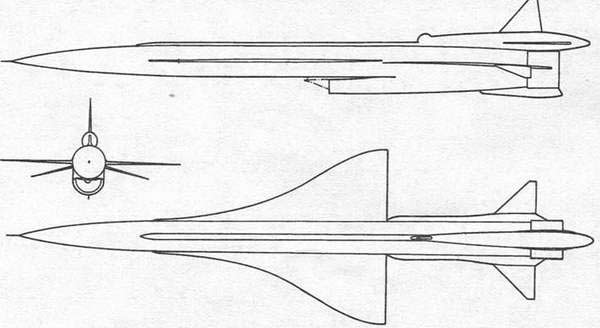
 В новеньком проекте были применены многие решения, которые успели пройти проверку при разработке комплекса ВР-3, была сохранена и общая сборка беспилотного самолета «143» («Рейс»). Летательный аппарат представлял собой бесхвостку с недвижным фронтальным горизонтальным оперением - дестабилизатором. Треугольное крыло с двухсекционными элевонами складывалось в транспортном положении для перевозки. Фюзеляж в носовой части, где размещена разведывательная аппаратура, блоки автономной бортовой системы управления и три топливных бака, имел круглое сечение, а от воздухопоглотителя - округлое. Его канал плавненько опускался вниз к движку, изгибаясь так, чтоб диск первой ступени его компрессора снаружи не просматривался. Благодаря этому, также композитной конструкции носовой части фюзеляжа и фронтальных кромок крыла возлагали надежды понизить отраженный сигнал при облучении неприятельским радаром и защитить летательный аппарат от зенитных ракет с радиолокационным наведением. А наименее чувствительные ракеты «воздух-воздух» AIM-7 «Спэрроу» на встречном курсе его не могли «взять» в принципе.
Над соплом размещался кок посадочного парашюта, по этому понижалась возможность захвата для радиолокационных и термических головок ракет, если неприятельский перехватчик запускал их сзади с более высочайшего эшелона. Над движком в отсеке меж извивом «трубы» воздухопоглотителя и контейнером парашюта размещались агрегаты гидравлики и электросистемы. Взлет БПЛА производился с буксируемой пусковой установки СПУ-141 при помощи сбрасываемого ракетного ускорителя. Угол его установки регулировался перед запуском зависимо от центровки, которая определялась заправкой и установленной аппаратурой. В комплекс также входили транспортно-заряжающая машина ТЗМ-141, подвижный пункт приема, обработки и дешифрования разведывательной инфы, машины для заправки топливом, спецжидкостями и газами, авто с оборудованием для проверки систем БПЛА, аэродромный пусковой агрегат (АПА) для подачи электропитания всем компонентам комплекса, также грузовик для подбора парашюта.
Проектирование нового комплекса потребовало напряжения всех сил. В его ходе пришлось пересмотреть даже ряд главных положений, положенных в базу проекта на стадии предэскизной проработки. К примеру, изменение стратегии внедрения аппарата отразилось на его конструкции. Заказчик лицезрел новый БПЛА максимально обычным и сравнимо дешевым массовым средством ведения оперативно-тактической разведки. Расчет боевой стойкости группировки БПЛА в критериях насыщенного противодействия войсковой ПВО показал, что достижение скорости 1300 км/ч уже не дает особенных преимуществ, и по согласованию с военными было решено ограничиться спектром в 900-1100 км/ч. Это позволяло вести прочностной расчет на наименьший высокоскоростной напор, облегчить и сделать проще конструкцию аппарата за счет отказа от форсажной камеры мотора и регулируемого воздухопоглотителя, уменьшить припас горючего. Бесфорсажный движок имел пониженную температуру реактивной струи, и возможность его поражения ракетами с инфракрасным самонаведением стала приметно меньше.
В новеньком проекте были применены многие решения, которые успели пройти проверку при разработке комплекса ВР-3, была сохранена и общая сборка беспилотного самолета «143» («Рейс»). Летательный аппарат представлял собой бесхвостку с недвижным фронтальным горизонтальным оперением - дестабилизатором. Треугольное крыло с двухсекционными элевонами складывалось в транспортном положении для перевозки. Фюзеляж в носовой части, где размещена разведывательная аппаратура, блоки автономной бортовой системы управления и три топливных бака, имел круглое сечение, а от воздухопоглотителя - округлое. Его канал плавненько опускался вниз к движку, изгибаясь так, чтоб диск первой ступени его компрессора снаружи не просматривался. Благодаря этому, также композитной конструкции носовой части фюзеляжа и фронтальных кромок крыла возлагали надежды понизить отраженный сигнал при облучении неприятельским радаром и защитить летательный аппарат от зенитных ракет с радиолокационным наведением. А наименее чувствительные ракеты «воздух-воздух» AIM-7 «Спэрроу» на встречном курсе его не могли «взять» в принципе.
Над соплом размещался кок посадочного парашюта, по этому понижалась возможность захвата для радиолокационных и термических головок ракет, если неприятельский перехватчик запускал их сзади с более высочайшего эшелона. Над движком в отсеке меж извивом «трубы» воздухопоглотителя и контейнером парашюта размещались агрегаты гидравлики и электросистемы. Взлет БПЛА производился с буксируемой пусковой установки СПУ-141 при помощи сбрасываемого ракетного ускорителя. Угол его установки регулировался перед запуском зависимо от центровки, которая определялась заправкой и установленной аппаратурой. В комплекс также входили транспортно-заряжающая машина ТЗМ-141, подвижный пункт приема, обработки и дешифрования разведывательной инфы, машины для заправки топливом, спецжидкостями и газами, авто с оборудованием для проверки систем БПЛА, аэродромный пусковой агрегат (АПА) для подачи электропитания всем компонентам комплекса, также грузовик для подбора парашюта.
Проектирование нового комплекса потребовало напряжения всех сил. В его ходе пришлось пересмотреть даже ряд главных положений, положенных в базу проекта на стадии предэскизной проработки. К примеру, изменение стратегии внедрения аппарата отразилось на его конструкции. Заказчик лицезрел новый БПЛА максимально обычным и сравнимо дешевым массовым средством ведения оперативно-тактической разведки. Расчет боевой стойкости группировки БПЛА в критериях насыщенного противодействия войсковой ПВО показал, что достижение скорости 1300 км/ч уже не дает особенных преимуществ, и по согласованию с военными было решено ограничиться спектром в 900-1100 км/ч. Это позволяло вести прочностной расчет на наименьший высокоскоростной напор, облегчить и сделать проще конструкцию аппарата за счет отказа от форсажной камеры мотора и регулируемого воздухопоглотителя, уменьшить припас горючего. Бесфорсажный движок имел пониженную температуру реактивной струи, и возможность его поражения ракетами с инфракрасным самонаведением стала приметно меньше.
 На первых опытнейших БПЛА «141» ставили турбореактивные движки Р9А-300. Их переделывали из серийных ТРДФ типа РД-9, которые выпускались для истребителей МиГ-19, методом снятия форсажной камеры и топливной автоматики управления ею. Таких движков с остатком ресурса, достаточным для внедрения на «беспилотниках», находилось на складах много и числилось, что особое изделие проектировать и выпускать нет смысла, а дешевле использовать имеющийся припас старенькых движков. Их удалось сделать еще проще и дешевле в эксплуатации за счет упрощения системы регулирования на главных режимах. Отказ от сверхзвука дозволил сделать проще и автоматическую бортовую систему управления самолета АБСУ-141. А это был самый непростой и дорогой элемент комплекса. На маршруте требовалось делать до 3-х запрограммированных заблаговременно разворотов и 6 раз поменять высоту полета, а после выполнения задания - возвратиться и выполнить посадку в данном районе на грунт при помощи убирающегося лыжного либо колесного шасси по-самолетному. Числилось, что только так реально избежать ударных нагрузок, способных вывести из строя самолет и его аппаратуру. Но воплотить такую посадку тогда технической способности не было, и Заказчика удалось уверить использовать парашют, что к тому же устраняло его от необходимости подготовки достаточно огромных площадок на месте внедрения комплекса. А это упрощало процесс его внедрения и облагораживало его маскировку в боевых критериях.
Но для того, чтоб касание было достаточно мягеньким, парашют пришлось спроектировать эксклюзивный - площадью 950 м2. Он был в то время наибольшим в СССР и по площади превосходил даже применяемый на спускаемом аппарате галлактического корабля «Союз». Подойдя к точке посадки, БПЛА сливал невыработанное горючее, потом делал «горку» и на ее восходящем участке отстреливал хвостовой кок. С коком выходил вспять маленький тормозной парашют, который растягивал основной купол. Это происходило после возвращения аппарата в горизонтальный полет. Когда основной купол выходил, малый тормозной парашют, фал которого был рассчитан на строго данное усилие, обрывался, чтоб не мешать раскрытию главного купола. Наполняясь, он специальной системой перецеплялся в район центра тяжести, чтоб снижавшийся самолет оставался в комфортном для приземления горизонтальном положении, и в этот момент сливался остаток аммиака - хладагента из системы остывания отсека спецаппаратуры.
На посадке БПЛА выпускал три стойки шасси «пяточного» типа и особые длинноватые щупы - они первыми касались земли и включали установленный под куполом парашюта тормозной ракетный движок, который в последний момент совсем гасил скорость. Аналогичное решение использовано в спускаемом аппарате галлактического корабля «Союз» и в платформах для парашютного десантирования тяжеленной техники ВДВ. Вся система работала автоматом, а в качестве исполнительных приводов использовались пиропатроны. Ее отработка преподала ряд сюрпризов. В один прекрасный момент на испытаниях автоматика не сработала, и машина уткнулась носом в землю, но этот случай был единичным. Кандидатуры парашюту тогда не было, и он был доведен до совершенства, хотя для этого пришлось издержать много сил и сделать много испытательных полетов. Кстати, америкосы тоже вволю намучились с различными системами посадки БПЛА, даже подбор самолетом и вертолетом пробовали, но так и не отыскали полностью надежного решения и на огромных аппаратах были обязаны возвратиться к «самолетной» посадке, зачем требуется реальный аэродром и особые радиотехнические системы, которые его демаскируют.
На первых опытнейших БПЛА «141» ставили турбореактивные движки Р9А-300. Их переделывали из серийных ТРДФ типа РД-9, которые выпускались для истребителей МиГ-19, методом снятия форсажной камеры и топливной автоматики управления ею. Таких движков с остатком ресурса, достаточным для внедрения на «беспилотниках», находилось на складах много и числилось, что особое изделие проектировать и выпускать нет смысла, а дешевле использовать имеющийся припас старенькых движков. Их удалось сделать еще проще и дешевле в эксплуатации за счет упрощения системы регулирования на главных режимах. Отказ от сверхзвука дозволил сделать проще и автоматическую бортовую систему управления самолета АБСУ-141. А это был самый непростой и дорогой элемент комплекса. На маршруте требовалось делать до 3-х запрограммированных заблаговременно разворотов и 6 раз поменять высоту полета, а после выполнения задания - возвратиться и выполнить посадку в данном районе на грунт при помощи убирающегося лыжного либо колесного шасси по-самолетному. Числилось, что только так реально избежать ударных нагрузок, способных вывести из строя самолет и его аппаратуру. Но воплотить такую посадку тогда технической способности не было, и Заказчика удалось уверить использовать парашют, что к тому же устраняло его от необходимости подготовки достаточно огромных площадок на месте внедрения комплекса. А это упрощало процесс его внедрения и облагораживало его маскировку в боевых критериях.
Но для того, чтоб касание было достаточно мягеньким, парашют пришлось спроектировать эксклюзивный - площадью 950 м2. Он был в то время наибольшим в СССР и по площади превосходил даже применяемый на спускаемом аппарате галлактического корабля «Союз». Подойдя к точке посадки, БПЛА сливал невыработанное горючее, потом делал «горку» и на ее восходящем участке отстреливал хвостовой кок. С коком выходил вспять маленький тормозной парашют, который растягивал основной купол. Это происходило после возвращения аппарата в горизонтальный полет. Когда основной купол выходил, малый тормозной парашют, фал которого был рассчитан на строго данное усилие, обрывался, чтоб не мешать раскрытию главного купола. Наполняясь, он специальной системой перецеплялся в район центра тяжести, чтоб снижавшийся самолет оставался в комфортном для приземления горизонтальном положении, и в этот момент сливался остаток аммиака - хладагента из системы остывания отсека спецаппаратуры.
На посадке БПЛА выпускал три стойки шасси «пяточного» типа и особые длинноватые щупы - они первыми касались земли и включали установленный под куполом парашюта тормозной ракетный движок, который в последний момент совсем гасил скорость. Аналогичное решение использовано в спускаемом аппарате галлактического корабля «Союз» и в платформах для парашютного десантирования тяжеленной техники ВДВ. Вся система работала автоматом, а в качестве исполнительных приводов использовались пиропатроны. Ее отработка преподала ряд сюрпризов. В один прекрасный момент на испытаниях автоматика не сработала, и машина уткнулась носом в землю, но этот случай был единичным. Кандидатуры парашюту тогда не было, и он был доведен до совершенства, хотя для этого пришлось издержать много сил и сделать много испытательных полетов. Кстати, америкосы тоже вволю намучились с различными системами посадки БПЛА, даже подбор самолетом и вертолетом пробовали, но так и не отыскали полностью надежного решения и на огромных аппаратах были обязаны возвратиться к «самолетной» посадке, зачем требуется реальный аэродром и особые радиотехнические системы, которые его демаскируют.
Источник: dogswar.ru
Обсудить
Возможно интересно:
Читайте также:




Комментарии (0)
Информация
Посетители, находящиеся в группе Гости, не могут оставлять комментарии к данной публикации.
Посетители, находящиеся в группе Гости, не могут оставлять комментарии к данной публикации.