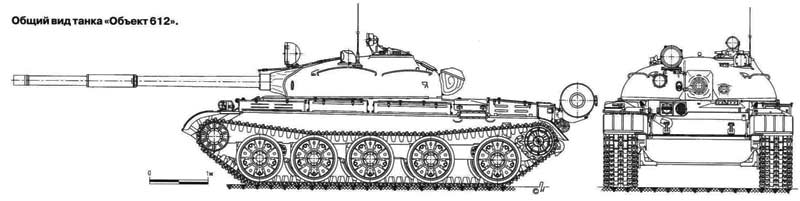
Опытный танк «Объект 612» (СССР)
 Танк «Объект 612» был разработан на базе танка Т-62 в 1962-1963 гг. в ГС ОКБ-174 завода №174 8 Омске под управлением начальника конструкторского бюро А.А. Морова на основании постановления ЦК КПСС и Совета Министров СССР №972-416 от 25 октября 1961 г. (приказ ГКОТ СМ СССР №102 от 26 февраля 1962 г.). Конкретное управление ОКР производил заместитель начальника конструкторского бюро по опытным работам Г.В. Мазепа. Ведущими по машине в ОКБ-174 являлись М.К. Назаров и Б. Науменко. В работе учавствовали и спецы ВНИИ-100. В 1963-1964 гг. на заводе №174 сделали два опытнейших эталона танка, которые прошли фабричные, а в период с февраля по август 1965 г. - и полигонные тесты на НИИБТ полигоне. Улучшение конструкции машины было продолжено во 2-м периоде после войны.
Танк «Объект 612» был разработан на базе танка Т-62 в 1962-1963 гг. в ГС ОКБ-174 завода №174 8 Омске под управлением начальника конструкторского бюро А.А. Морова на основании постановления ЦК КПСС и Совета Министров СССР №972-416 от 25 октября 1961 г. (приказ ГКОТ СМ СССР №102 от 26 февраля 1962 г.). Конкретное управление ОКР производил заместитель начальника конструкторского бюро по опытным работам Г.В. Мазепа. Ведущими по машине в ОКБ-174 являлись М.К. Назаров и Б. Науменко. В работе учавствовали и спецы ВНИИ-100. В 1963-1964 гг. на заводе №174 сделали два опытнейших эталона танка, которые прошли фабричные, а в период с февраля по август 1965 г. - и полигонные тесты на НИИБТ полигоне. Улучшение конструкции машины было продолжено во 2-м периоде после войны.
Танк «Объект 612» отличался серийного Т-62 только установкой оборудования автоматического управления коробкой, которое включало автоматический привод управления коробкой и основным фрикционом, также систему гидроусилителей управления ПМП. Внедрение этого привода позволило свести все управление коробкой к управлению одним органом - педалью подачи горючего. Управление коробкой обеспечивалось в 3-х режимах; автоматическом, автоматическом и ручном (ручной привод ничем не отличался от управления на серийном танке). Переключение с 1-го режима на другой производилось механиком-водителем при помощи тумблера, располагавшегося на пульте управления. При автоматическом режиме переключение передач выполнялось автоматом зависимо от положения педали подачи горючего и частоты вращения коленчатого вала мотора согласно определенному закону, отвечавшему требованиям обеспечения больших динамических и топливо-экономических характеристик.
Сигналы для переключения на высшую и на низшую передачи выдавались сенсором автоматического переключения, в каком в качестве тахометра употреблялся тахогенератор переменного тока (ТД-5М), а в качестве сенсора положения педали - потенциометр (ПЛ1-1). При автоматическом режиме выбор момента переключения передач выполнялся самим механиком-водителем. Для переключения ему требовалось только отклонить ручку пульта от себя либо на себя зависимо от того, на какую передачу следовало перейти - на высшую либо низшую. Выбор передачи осуществлялся как и при автоматическом режиме - избирателем скорости, имевшимся в системе автоматики. Переключение на ручной привод выполнялось либо механиком-водителем при помощи тумблера, либо автоматом, если в гидросистеме привода падало давление либо нарушалось питание его электросхемы. Для этого в гидросистеме имелся разгрузочный клапан с электрическим управлением, который при невыключенном приводе соединял насос и гидроаккумулятор со сливом.
При автоматическом либо автоматическом режиме магнит клапана отсоединял насос и гидроаккумулятор от слива. При всем этом насос создавал в гидросистеме давление и заряжал гидроаккумулятор. При помощи бустеров муфты переключений осуществлялся переход на гидропривод, который оставался включенным, пока в системе имелось давление. При падении давления в гидросистеме муфты под действием пружин переключались на ручной привод. Привод управления коробкой состоял из кулисы, 3-х продольных тяг, вертикального валика, 3-х маленьких поперечных тяг, гидравлического механизма переключения передач с золотниковой коробкой, механизма переключения с ручного на автоматический привод и 3-х контактных коробок. Для уменьшения износов синхронизаторов коробки и других частей коробки в схему автоматики было введено устройство автоматической синхронизации. В связи с внедрением устройства автоматической синхронизации поменялась общая схема переключения передач. По сигналу на переключение выключался главный фрикцион, а включенная ранее передача устанавливалась в нейтраль, после этого фрикцион опять врубался, и выполнялась синхронизация движком. После уравнивания угловых скоростей включаемой шестерни и головного вала выдавался сигнал на выключение головного фрикциона и включение передачи.
В состав привода управления основным фрикционом входили: труба педали с рычагами, защелка, гидроцилиндр, сервопружина, продольная тяга, поперечный валик с рычагами и стяжной муфтой, маленькая тяга, контактная коробка и др. Привод управления основным фрикционом отличался от серийного привода танка Т-62 установкой заместо пневмогидравлического привода управления гидравлического цилиндра автоматического привода и наличием контактной коробки с приводом. Привод подачи горючего включал: педаль, механизм отключения педали, поперечный валик, корректор, концевой выключатель, механизм остановки мотора, вертикальную тягу, комбинированный механизм, объединявший автоматический привод и ручной, гидроцилиндр, пружинный компенсатор, продольную и вертикальную тяги, переводной рычаг рейки топливного насоса, рычаги и возвратимые пружины. Комбинированный привод служил для обеспечения фиксированных положений привода подачи горючего в случае управления машиной из башни, также при включении режима автоматической подачи горючего механиком-водителем.
Электронный следящий привод управления ПМП и остановочными тормозами обеспечивал управление ими с пультов механика-водителя и командира танка (электрогидравлический следящий привод), также ручное управление ПМП механиком-водителем. Он был сотворен на базе аналогичного привода танка Т-62 и отличался от него конструкцией переходного кронштейна, вновь установленными кронштейном сервопружин и блоком цилиндров ПМП, также отчасти модифицированными продольными тягами. Другие узлы и детали взяли в долг у привода танка Т-62. Не считая того, остановочные тормоза имели доп независящий привод от педали (привод горного тормоза). Следящая система управления танка «Объект 612» обеспечивала: изменение высокоскоростного режима мотора при нейтральном состоянии коробки и на включенной передаче, изменение высокоскоростного режима мотора при переключении передач в согласовании с включаемым передаточным числом и частотой вращения выходного вала коробки, также регулирование синхронизирующего момента дискового тормоза центрального синхронизатора.
Синхронизация включавшихся зубчатых муфт при переключении на высшие передачи осуществлялась за счет замедления промежного вала коробки дисковым тормозом, установленным на промежном валу, а при переключении на низшие передачи - повышением частоты вращения коленчатого вала мотора при включенном главном фрикционе. В качестве элемента сопоставления угловых скоростей включаемых муфт применялось чувствительное реле (типа РДЧГ), на обмотку управления которого подавались напряжения с тахогенераторов промежного и выходного валов коробки. Следящий электрогидравлический привод управления ПМП задействовался исключительно в случае управления из башни, что усложнило его общую схему и привело к повышению не только лишь объема блока реле, да и общей массы привода. Для обеспечения автоматического и автоматического режима управления в привод потребовалось ввести следящее устройство управления приводом подачи горючего. Но внедрение следящего устройства в приводе подачи горючего в ГС ОКБ-174 признали нецелесообразным, так как в данном случае система управления из башни ничем не отличалась бы от системы управления с места механика-водителя. Потому спецы ГС ОКБ-174 предложили схему управления приводом подачи горючего при помощи автоматического привода, имевшего три фиксированных положения: на малой, рабочей и наибольшей частоте вращения коленчатого вала мотора. Рабочую частоту вращения коленчатого вала мотора избрали в границах 1600-1700 мин. Для предотвращения переключения на высшую передачу при частоте вращения коленчатого вала мотора, равной 1700 мин, в сенсор автоматического переключения ввели сопротивление, обеспечивавшее срабатывание реле разрешения увеличения только при частоте вращения 2030 мин.
Переключение передач командиром танка производилось при помощи ручки пульта при отклонении ее в положение «Передача выше» либо «Передача ниже». Автоматический режим у командира отсутствовал. В процессе отработки оборудования автоматического управления коробкой в ГС ОКБ-174 сделали вывод, что внедрение привода управления движением из башни имело смысл только при движении танка на плаву (с внедрением плавсредств). В бою такое управление, по их воззрению, навряд ли оказалось бы комфортным из-за отвлечения внимания командира на наблюдение за полем боя. На марше управление из башни также было бы неудовлетворительным из-за худшей обзорности с места командира, в особенности при закрытом лючке. Не считая того, введение такового привода вело к значительному усложнению схемы автоматики и использованию в схеме частей, нужных только для системы управления из башни. При всем этом степень усложнения схемы приводов управления ПМП зависела от предъявляемых к ней требований. В итоге от использования данного привода в опытнейших образчиках отказались.
Разработанная система автоматического управления с центральной автоматической синхронизацией обеспечила по сопоставлению с ручным управлением уменьшение времени переключения на высшие передачи в 1,5-2 раза (время переключения на низшие передачи не поменялось) и значительно понизила нагруженность переключаемых частей коробки и головного фрикциона. Работа буксования головного фрикциона уменьшалась в отдельных случаях в 20-25 раз. Экспериментальные исследования процессов переключения передач на танке «Объект 612» проявили, что качество переходных процессов при синхронизации зависело от точности системы сопоставления угловых скоростей синхронизируемых зубчатых муфт, также от структуры систем управления движком и тормозным элементом центрального синхронизатора. В примененной разомкнутой системе управления, обеспечивавшей релейный режим работы регулирующих органов мотора (рейки топливного насоса) и тормозного элемента (золотника), ошибка в синхронизации зубчатых муфт зависела от запаздывания управляющих и исполнительных устройств по отношению к сигналу устройства сопоставления и от величины перерегулирования при изменении опции регулятора мотора. Принцип автоматического переключения передач для коробки среднего танка был также проверен на радиоуправляемых танковых мишенях «Объект 601А» и «Объект 601Б».
Тактико-технические свойства танка «Объект 612» Боевая масса - 36,5-37 т; экипаж - 4 чел.; броневая защита - противоснарядная; мощность мотора - 426 кВт (580 л.c.) наибольшая скорость -50 км/ч. Вооружение: - пушка - 115 мм гладкоствольная - 1 пулемет -7,62 мм создатели статьи: М.В. Павлов, И.В. Павлов первоисточник: журнальчик «Техника и Вооружение вчера, сейчас, завтра» 2012 г. №08
Источник: dogswar.ru
Возможно интересно:
Читайте также:






Посетители, находящиеся в группе Гости, не могут оставлять комментарии к данной публикации.