Зенитный ракетный комплекс РЗ-25 «Даль» (изделие «400») (СССР)
 После проведения удачных полигонных испытаний ЗРК С-25 с ракетами В-300, сделанными в ОКБ-301, главный конструктор С.А.Лавочкин и министр радиопромышленности В.Д.Калмыков посреди 1950-х годов вышли к Председателю Совмина СССР Н.С.Хрущёву с предложением о разработке многообещающего дальнобойного многоканального зенитно-ракетного комплекса. ЗРК, позже получивший обозначение РЗ-25 «Даль», согласно предложению, был должен создавать одновременный обстрел 10 целей 10 ракетами на умопомрачительной для тех пор дальности - до 160-180 км. Это позволяло перейти от кольцевого построения частей системы к центральному. Соответственно, радиотехнические средства должны были обеспечивать не секторное, а радиальное обнаружение и сопровождение целей и наведение на них ракет.
При наибольшей заявленной дальности ракет, увеличенной в 6-8 раз по сопоставлению с ракетами комплекса С-25, разрешающая способность РЛС по угловым координатам уже не могла обеспечить приемлемую точность наведения ракет с внедрением радиокомандного управления, подобающую радиусу поражения боевой части. Именно потому, кроме радиокомандного наведения ракет на основной части линии движения, было принято решение применить на ракете радиолокационную головку самонаведения и не использовать её на конечном участке полёта к цели. ЗРК РЗ-25 «Даль» планировалось сначала развернуть в районе Ленинграда, а позднее - в районе Баку и т.д.
Хрущёву и его окружению приглянулся проект ЗРК РЗ-25 «Даль», и Постановлением Совмина СССР № 602-369 от 24 марта 1955 года были начаты полномасштабные работы по его созданию. Главными конструкторами и главными создателями частей системы Постановлением Совмина определялись: ОКБ-301 МАП, главный конструктор С.А.Лавочкин - головной исполнитель и создатель контура системы наведения и зенитной управляемой ракеты; по радиолокационной ГСН - НИИ-17 ГКРЭ, главный конструктор А.Б.Слепушкин; по РЛС наведения - В.В.Самарин; по радиопередающей и приёмной аппаратуре - Н.И.Белов; по управляющей математической машине - Базилевский, НИЭИ ГКРЭ; по ЖРД стартового ускорителя - А.М.Исаев; БЧ ракеты - В.А.Сухих, КБ НИИ-6 МСХМ; радиовзрыватель - Н.С.Расторгуев, НИИ-504 МОП; стартовое и наземное оборудование - В.П.Бармин; прямоточный воздушно-реактивный движок - М.М.Бондарюк, ОКБ-670 МАП .
Постановлением Совмина № 218-556 от 11 ноября 1957 года задавалась разработка и создание предусмотренной как составная часть системы «Даль» радиолокационной станции «Памир». Головным создателем её был определён НИИ-244. В 1961 году РЛС радиального обзора П-90 «Памир», созданная для обнаружения и наведения самолётов, была принята на вооружение в составе других систем ПВО. На базе РЛС после прекращения работ по комплексу «Даль» был сотворен радиолокационный узел большой производительности «Холм». Согласно уточнённому техническому заданию, утверждённому заказчиком, радиолокационные средства системы «Даль» должны были обнаруживать воздушные цели с действенной отражающей поверхностью, соответственной фронтовому бомбовозу типа Ил-28, парящие со скоростями до 3000 км/час на дальности до 400 км.
После проведения удачных полигонных испытаний ЗРК С-25 с ракетами В-300, сделанными в ОКБ-301, главный конструктор С.А.Лавочкин и министр радиопромышленности В.Д.Калмыков посреди 1950-х годов вышли к Председателю Совмина СССР Н.С.Хрущёву с предложением о разработке многообещающего дальнобойного многоканального зенитно-ракетного комплекса. ЗРК, позже получивший обозначение РЗ-25 «Даль», согласно предложению, был должен создавать одновременный обстрел 10 целей 10 ракетами на умопомрачительной для тех пор дальности - до 160-180 км. Это позволяло перейти от кольцевого построения частей системы к центральному. Соответственно, радиотехнические средства должны были обеспечивать не секторное, а радиальное обнаружение и сопровождение целей и наведение на них ракет.
При наибольшей заявленной дальности ракет, увеличенной в 6-8 раз по сопоставлению с ракетами комплекса С-25, разрешающая способность РЛС по угловым координатам уже не могла обеспечить приемлемую точность наведения ракет с внедрением радиокомандного управления, подобающую радиусу поражения боевой части. Именно потому, кроме радиокомандного наведения ракет на основной части линии движения, было принято решение применить на ракете радиолокационную головку самонаведения и не использовать её на конечном участке полёта к цели. ЗРК РЗ-25 «Даль» планировалось сначала развернуть в районе Ленинграда, а позднее - в районе Баку и т.д.
Хрущёву и его окружению приглянулся проект ЗРК РЗ-25 «Даль», и Постановлением Совмина СССР № 602-369 от 24 марта 1955 года были начаты полномасштабные работы по его созданию. Главными конструкторами и главными создателями частей системы Постановлением Совмина определялись: ОКБ-301 МАП, главный конструктор С.А.Лавочкин - головной исполнитель и создатель контура системы наведения и зенитной управляемой ракеты; по радиолокационной ГСН - НИИ-17 ГКРЭ, главный конструктор А.Б.Слепушкин; по РЛС наведения - В.В.Самарин; по радиопередающей и приёмной аппаратуре - Н.И.Белов; по управляющей математической машине - Базилевский, НИЭИ ГКРЭ; по ЖРД стартового ускорителя - А.М.Исаев; БЧ ракеты - В.А.Сухих, КБ НИИ-6 МСХМ; радиовзрыватель - Н.С.Расторгуев, НИИ-504 МОП; стартовое и наземное оборудование - В.П.Бармин; прямоточный воздушно-реактивный движок - М.М.Бондарюк, ОКБ-670 МАП .
Постановлением Совмина № 218-556 от 11 ноября 1957 года задавалась разработка и создание предусмотренной как составная часть системы «Даль» радиолокационной станции «Памир». Головным создателем её был определён НИИ-244. В 1961 году РЛС радиального обзора П-90 «Памир», созданная для обнаружения и наведения самолётов, была принята на вооружение в составе других систем ПВО. На базе РЛС после прекращения работ по комплексу «Даль» был сотворен радиолокационный узел большой производительности «Холм». Согласно уточнённому техническому заданию, утверждённому заказчиком, радиолокационные средства системы «Даль» должны были обнаруживать воздушные цели с действенной отражающей поверхностью, соответственной фронтовому бомбовозу типа Ил-28, парящие со скоростями до 3000 км/час на дальности до 400 км.
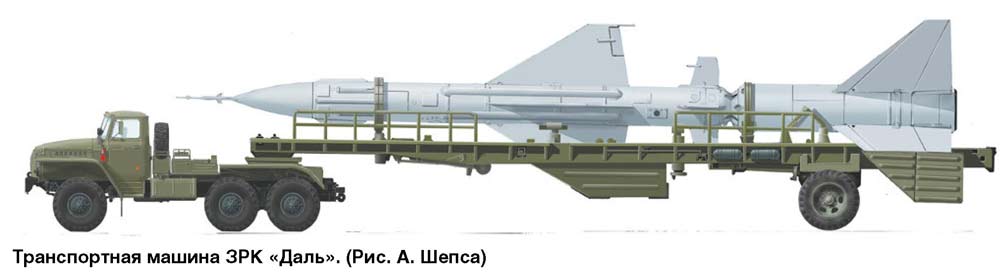 Для ЗРК РЗ-25 «Даль» в ОКБ-301 была сотворена ракета 400 (индекс ГАУ - 5В11). Ракета имела нормальную (самолётную) аэро схему . Длина ракеты около 13,6 м, размах крыла маршевой ступени около 2,7 м, поперечник корпуса стартового мотора около 0,8 м, а маршевого - около 0,65 м. Стартовый вес ракеты 8757 кг. Ракета 400 могла поражать цели на высотах от 5,5 м до 30 км. Наибольшая скорость ракеты до 3000 км/час. Как уже говорилось, начальная дальность поражения целей составляла 160-180 км, но Лавочкину удалось уговорить управление уменьшить её. Согласно Постановлению Совмина № 1148-581 от 17 августа 1956 года дальность стрельбы была снижена до 150-160 км .
1-ая ступень ракеты 400 комплектовалась твердотопливным движком ПРД-70М, разработанным в КБ-2 завода № 81. В движке использовалось горючее марки РСТ-4К в 7 шашках общим весом 2660 кг. 2-ая (маршевая) ступень ракеты комплектовалась ЖРД типа Р01-154 с регулируемой в полёте тягой. Движок комплектовался турбонасосной системой подачи горючего. Спроектировали его в ОКБ-154 под управлением С.А.Косберга. Сначало стартовую ступень желали оснастить ЖРД, и её оборудовали аэродинамическими рулями. По результатам первых пусков были внесены доработки в конструкцию ракеты. С первой ступени сняли оказавшиеся ненадобными органы управления и управляющие приводы, но для обеспечения управления по наклону на стартовом участке использовали элероны на крыле 2-ой ступени. Была несколько изменена форма рулей 2-ой ступени и увеличена жёсткость крыльев.
Запуск ракет проводился под углом к горизонту. От момента старта до сброса стартовой ступени ракета летела с фиксированными элементами управления. Потом шёл шаг комбинированного управления инерциальной системой управления (автопилот) и по радиокомандам с земли. На конечном участке линии движения врубалась активная радиолокационная ГСН «Зенит». ГСН «Зенит» была разработана в НИИ-17 ГКРЭ, главный конструктор Г.М.Кунявский. Имелась и другая ГСН «Радуга», разработанная в том же НИИ под управлением А.Б.Слепушкина. Вес боевой части ракеты около 200 кг. Подрыв БЧ выполнялся при помощи радиовзрывателя «Гриф». ЗРК «Даль» планировали оснастить обыкновенной и ядерной боевыми частями. Совместные лётные тесты ракеты с осколочной БЧ были запланированы на II квартал 1964 года, а со специальной БЧ - на IV квартал такого же года.
Для ЗРК РЗ-25 «Даль» в ОКБ-301 была сотворена ракета 400 (индекс ГАУ - 5В11). Ракета имела нормальную (самолётную) аэро схему . Длина ракеты около 13,6 м, размах крыла маршевой ступени около 2,7 м, поперечник корпуса стартового мотора около 0,8 м, а маршевого - около 0,65 м. Стартовый вес ракеты 8757 кг. Ракета 400 могла поражать цели на высотах от 5,5 м до 30 км. Наибольшая скорость ракеты до 3000 км/час. Как уже говорилось, начальная дальность поражения целей составляла 160-180 км, но Лавочкину удалось уговорить управление уменьшить её. Согласно Постановлению Совмина № 1148-581 от 17 августа 1956 года дальность стрельбы была снижена до 150-160 км .
1-ая ступень ракеты 400 комплектовалась твердотопливным движком ПРД-70М, разработанным в КБ-2 завода № 81. В движке использовалось горючее марки РСТ-4К в 7 шашках общим весом 2660 кг. 2-ая (маршевая) ступень ракеты комплектовалась ЖРД типа Р01-154 с регулируемой в полёте тягой. Движок комплектовался турбонасосной системой подачи горючего. Спроектировали его в ОКБ-154 под управлением С.А.Косберга. Сначало стартовую ступень желали оснастить ЖРД, и её оборудовали аэродинамическими рулями. По результатам первых пусков были внесены доработки в конструкцию ракеты. С первой ступени сняли оказавшиеся ненадобными органы управления и управляющие приводы, но для обеспечения управления по наклону на стартовом участке использовали элероны на крыле 2-ой ступени. Была несколько изменена форма рулей 2-ой ступени и увеличена жёсткость крыльев.
Запуск ракет проводился под углом к горизонту. От момента старта до сброса стартовой ступени ракета летела с фиксированными элементами управления. Потом шёл шаг комбинированного управления инерциальной системой управления (автопилот) и по радиокомандам с земли. На конечном участке линии движения врубалась активная радиолокационная ГСН «Зенит». ГСН «Зенит» была разработана в НИИ-17 ГКРЭ, главный конструктор Г.М.Кунявский. Имелась и другая ГСН «Радуга», разработанная в том же НИИ под управлением А.Б.Слепушкина. Вес боевой части ракеты около 200 кг. Подрыв БЧ выполнялся при помощи радиовзрывателя «Гриф». ЗРК «Даль» планировали оснастить обыкновенной и ядерной боевыми частями. Совместные лётные тесты ракеты с осколочной БЧ были запланированы на II квартал 1964 года, а со специальной БЧ - на IV квартал такого же года.
 На боевых позициях РЛС обнаружения целей с многолучевым радиолокатором с высотой антенны порядка 15 м должна была устанавливаться на 25-метровом цилиндрическом бетонном сооружении («стакане») - две РЛС на полк. Вращение (поворот по азимуту) совмещённой конструкции антенн РЛС обнаружения и системы активного запроса-ответа выполнялось за счёт передвижения опор антенной системы по кольцевому рельсу. Рельс крепился на консольных опорах, расположенных радиально у верхушки бетонного «стакана». Антенны системы передачи команд, созданные для передачи команд на борт ракеты и команд управления на ГСН, располагались на позиции полка под отдельными радиопрозрачными колпаками.
Для размещения радиоэлектронной аппаратуры и вычислительных средств комплекса (управляющей машины наведения, созданной для автоматического сопровождения целей и ракет и формирования команд управления) приблизительно в 200 м от основания РЛС строились железобетонные сооружения на 18 боксов. Здание радиотехнического центра вычислений с размещённым в нем радиоэлектронным и холодильным оборудованием (для остывания аппаратуры) находилось за обваловкой для защиты от поражения осколками авиабомб.
Стартовые позиции 5 дивизионов полка размещались на местности в виде фактически правильных окружностей, разбитых на 6 секторов и окружённых кольцевыми дорогами протяжённостью около 800 м. В состав стартового дивизиона входили:
- кабина управления и подготовки старта - полузаглубленное железобетонное сооружение, расположенное в центре позиции за обваловкой;
- 6 подъёмно-пусковых установок (ППУ) с ракетами на направляющих;
- 30 зенитных ракет на рельсовых заряжающих машинах в 6 хранилищах.
Хранилище ракет представляло собой железобетонное дугообразное сооружение на 5 ракет, размещённых на рельсовых заряжающих машинах в личных боксах. Оно имело железобетонные двери со стороны пусковой установки и древесные в железном каркасе - с обратной стороны. На заряжающие машины ракеты подавались авто подъёмным краном с наружной от пусковой установки стороны хранилища. Все ракеты на стартовой позиции предполагалось содержать в состоянии «ОГ» («окончательная готовность»), другими словами вполне заправленными элементами горючего и оснащенными.
На боевых позициях РЛС обнаружения целей с многолучевым радиолокатором с высотой антенны порядка 15 м должна была устанавливаться на 25-метровом цилиндрическом бетонном сооружении («стакане») - две РЛС на полк. Вращение (поворот по азимуту) совмещённой конструкции антенн РЛС обнаружения и системы активного запроса-ответа выполнялось за счёт передвижения опор антенной системы по кольцевому рельсу. Рельс крепился на консольных опорах, расположенных радиально у верхушки бетонного «стакана». Антенны системы передачи команд, созданные для передачи команд на борт ракеты и команд управления на ГСН, располагались на позиции полка под отдельными радиопрозрачными колпаками.
Для размещения радиоэлектронной аппаратуры и вычислительных средств комплекса (управляющей машины наведения, созданной для автоматического сопровождения целей и ракет и формирования команд управления) приблизительно в 200 м от основания РЛС строились железобетонные сооружения на 18 боксов. Здание радиотехнического центра вычислений с размещённым в нем радиоэлектронным и холодильным оборудованием (для остывания аппаратуры) находилось за обваловкой для защиты от поражения осколками авиабомб.
Стартовые позиции 5 дивизионов полка размещались на местности в виде фактически правильных окружностей, разбитых на 6 секторов и окружённых кольцевыми дорогами протяжённостью около 800 м. В состав стартового дивизиона входили:
- кабина управления и подготовки старта - полузаглубленное железобетонное сооружение, расположенное в центре позиции за обваловкой;
- 6 подъёмно-пусковых установок (ППУ) с ракетами на направляющих;
- 30 зенитных ракет на рельсовых заряжающих машинах в 6 хранилищах.
Хранилище ракет представляло собой железобетонное дугообразное сооружение на 5 ракет, размещённых на рельсовых заряжающих машинах в личных боксах. Оно имело железобетонные двери со стороны пусковой установки и древесные в железном каркасе - с обратной стороны. На заряжающие машины ракеты подавались авто подъёмным краном с наружной от пусковой установки стороны хранилища. Все ракеты на стартовой позиции предполагалось содержать в состоянии «ОГ» («окончательная готовность»), другими словами вполне заправленными элементами горючего и оснащенными.
Источник: dogswar.ru
Обсудить
Возможно интересно:
Читайте также:



28 март 2025, Пятница
Проект авиационного ракетного комплекса на базе самолета Ан-22Р и МБР Р-27 (СССР)

Комментарии (0)
Информация
Посетители, находящиеся в группе Гости, не могут оставлять комментарии к данной публикации.
Посетители, находящиеся в группе Гости, не могут оставлять комментарии к данной публикации.